knutselen met drone2...

Een kompas laten ronddraaien met 2, 3 of 4 zelfgewikkelde spoelen. De spoelen zijn afkomstig van m'n kristalradio-project. Steek gewoon een grote ijzerhoudende massa, zoals een schroef in de kern en je hebt een electromagneet.
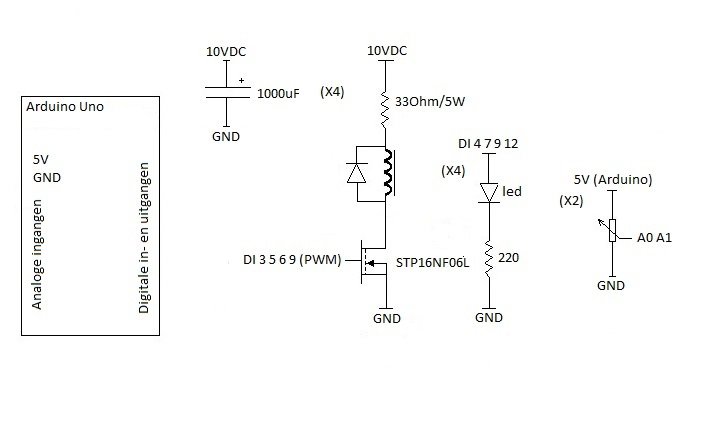
Daar de weerstand van de spoelen verwaarloosbaar klein is maken we gebruik van een kleine weerstand in serie. Daar er redelijk wat stroom al dan niet pwm gestuurd wordt is het wenselijk 5Watt- weerstanden te nemen.
In het schema hiernaast merk je ook 2 potentiometers. Deze gebruik ik om het draaiveld in te stellen. Al naar gelang de arduinocode kan je de potentiometerwaardes toewijzen aan een delay van een volgend opkomend veld of afzwakkend veld. Kan je een invloed uitoefenen op de pwm-sturingsgolf... enz...
Het is geen sinecure om het kompas te laten ronddraaien. De zelfgemaakte spoelen zijn niet even sterk. De spoelen liggen misschien niet exact op de juiste plaats. De serieweerstanden hebben hun toleranties. Dit alles kan je dan compenseren met de software.